
Robô de Inteligência Artificial realiza a primeira cirurgia sem ajuda humana da história
11 julho 2025 às 12h36
COMPARTILHAR
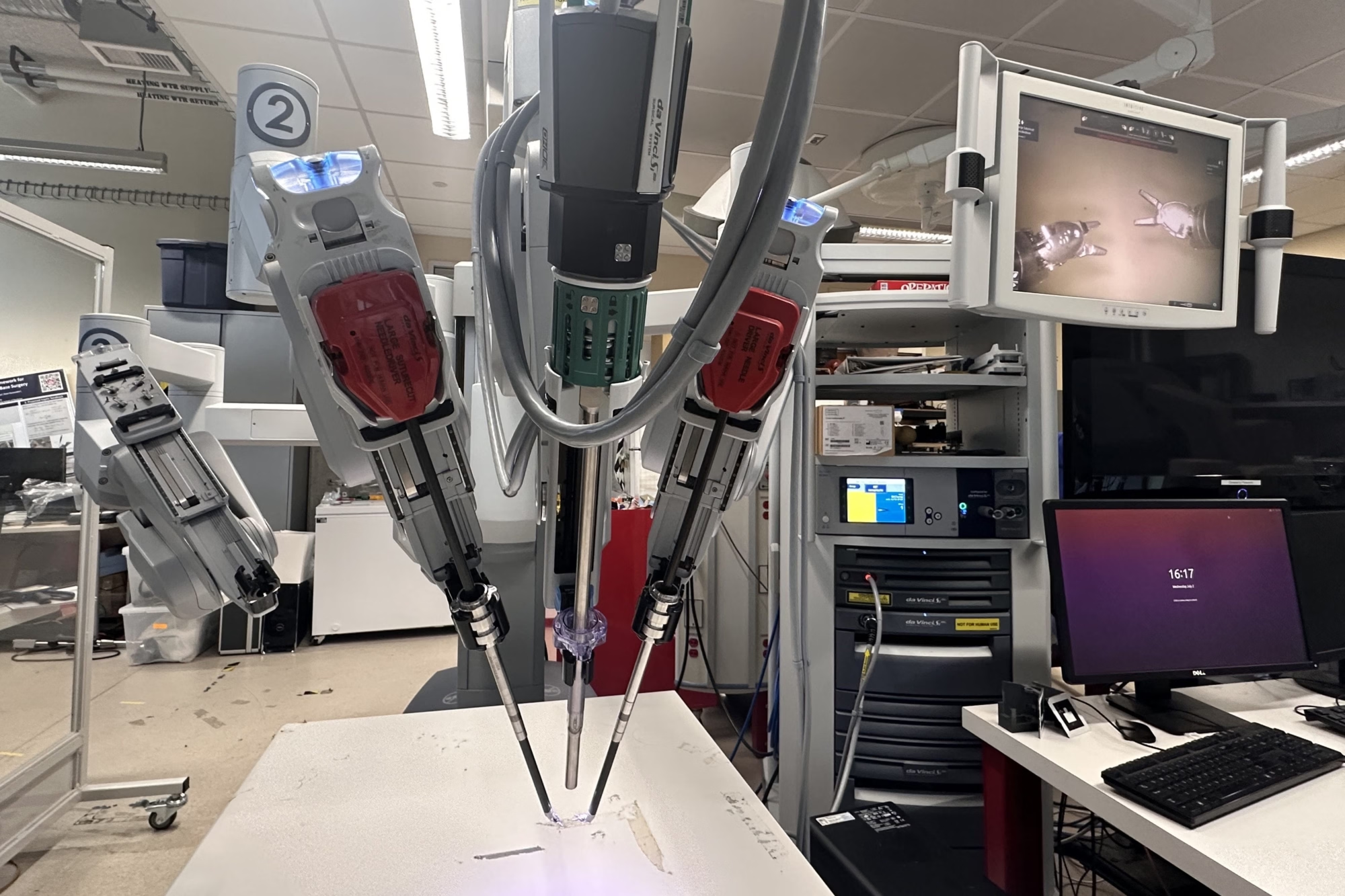
Um robô de inteligência artificial realizou a primeira cirurgia sem ajuda humana da história. A máquina foi treinada com vídeos de cirurgias e realizou uma remoção da vesícula biliar respondendo aos comandos de voz da equipe — como um cirurgião iniciante trabalhando com um mentor. A cirurgia foi realizada na universidade Johns Hopkins, e as descobertas foram publicadas hoje na Science Robotics no dia 7 de julho.
Segundo os autores da publicação, o robô cirúrgico hierárquico transformador (Hierarchical surgical robot transformer, SRT-H), criado pelo especialista em robótica médica Axel Krieger, teve um desempenho impecável durante os testes realizados antes da operação. Os testes envolveram cenários inesperados típicos de emergências médicas reais.
O trabalho foi financiado pelo governo dos EUA e representa um avanço transformador na robótica cirúrgica, segundo autores do estudo. À revista Hub, da John Hopkins University, Axel Krieger afirmou: “Esse avanço nos leva de robôs que podem executar tarefas específicas para robôs que realmente entendem os procedimentos cirúrgicos. Esta é uma distinção crucial que nos aproxima significativamente de sistemas cirúrgicos autônomos clinicamente viáveis, capazes de funcionar na realidade confusa e imprevisível do atendimento real ao paciente.”
Em 2022, o Robô autônomo de tecido inteligente (STAR), de Axel Krieger, realizou a primeira cirurgia robótica autônoma em um animal vivo — uma cirurgia laparoscópica em um porco. Mas esse robô exigiu tecido especialmente marcado, operou em um ambiente altamente controlado e seguiu um plano cirúrgico rígido e pré-determinado. Krieger disse que foi como ensinar um robô a dirigir por uma rota cuidadosamente mapeada.
Mas seu novo sistema, diz ele, “é como ensinar um robô a navegar em qualquer estrada, em qualquer condição, respondendo de forma inteligente a tudo o que encontrar”. O SRT-H, realmente realiza cirurgias, adaptando-se às características anatômicas individuais em tempo real, tomando decisões em tempo real e se autocorrigindo quando as coisas não saem como esperado.
Construído com a mesma arquitetura de aprendizado de máquina que alimenta o ChatGPT, o SRT-H também é interativo, capaz de responder a comandos de voz (“pegue a vesícula biliar”) e correções (“mova o braço esquerdo um pouco para a esquerda”). O robô aprende com esse feedback.

“Este trabalho representa um grande avanço em relação aos esforços anteriores, pois aborda algumas das barreiras fundamentais à implantação de robôs cirúrgicos autônomos no mundo real”, disse o autor principal, Ji Woong “Brian” Kim, ex-pesquisador de pós-doutorado na Johns Hopkins e agora na Universidade Stanford. “Nosso trabalho mostra que modelos de IA podem ser confiáveis o suficiente para a autonomia cirúrgica — algo que antes parecia distante, mas agora é comprovadamente viável.”
No ano passado, a equipe de Krieger usou o sistema para treinar um robô a realizar três tarefas cirúrgicas fundamentais: manipular uma agulha, levantar tecido corporal e suturar. Essas tarefas levavam apenas alguns segundos cada. O procedimento de remoção da vesícula biliar é muito mais complexo, uma sequência de 17 tarefas com duração de alguns minutos. O robô precisava identificar artérias e capturá-las com precisão, cortar e suturar partes.
O SRT-H aprendeu a realizar o trabalho da vesícula biliar assistindo a vídeos de cirurgiões da Johns Hopkins realizando o procedimento em corpos de porcos. A equipe reforçou o treinamento visual com legendas descrevendo as tarefas. Após assistir aos vídeos, o robô realizou a cirurgia com 100% de precisão.
Embora o robô tenha levado mais tempo para realizar o trabalho do que um cirurgião humano, os resultados foram comparáveis aos de um cirurgião especialista. “Assim como os residentes cirúrgicos frequentemente dominam diferentes partes de uma operação em ritmos diferentes, este trabalho ilustra a promessa de desenvolver sistemas robóticos autônomos de maneira igualmente modular e progressiva”, afirma o cirurgião Jeff Jopling, da Johns Hopkins, coautor.
O robô teve um desempenho impecável em condições anatômicas não uniformes e durante desvios inesperados — como quando os pesquisadores alteraram a posição inicial do robô e adicionaram corantes semelhantes a sangue que alteraram a aparência da vesícula biliar e dos tecidos circundantes.
“Para mim, isso realmente mostra que é possível realizar procedimentos cirúrgicos complexos de forma autônoma”, disse Krieger à revista Hub. “Esta é uma prova de conceito de que é possível e que esta estrutura de aprendizado por imitação pode automatizar procedimentos tão complexos com um alto grau de robustez.” Em seguida, a equipe afirma que gostaria de treinar e testar o sistema em mais tipos de cirurgias e expandir suas capacidades para realizar uma cirurgia completamente autônoma.

